聊城公司网站建设500全包送优化(南洋理工大学本科申请要求)南洋理工大学在哪里,
近年来,随着机器人技术的不断发展,群体机器人(Swarm Robotics)逐渐成为研究热点群体机器人系统通过多个简单个体的协同工作,展现出超越单个机器人的强大能力,在物流、灾害响应、农业等多个领域展现出广阔的应用前景。
然而,传统的机器人平台,如无人机(UAVs)和无人地面车辆(UGVs),在复杂或受限环境中存在很多限制,如体积大、机动性差以及续航能力有限等针对这些问题,研究人员引入了半机械昆虫(Cyborg Insects)作为群体导航的新解决方案。
半机械昆虫是指将电子控制器与活体昆虫结合的混合机器人,这种结合使得机器人既具有活体昆虫的高效能量利用和复杂地形适应能力,又具备可编程控制的能力尽管半机械昆虫在单个体控制方面已经取得了一些进展,但多个体协同导航的研究仍然相对匮乏。
这主要是由于昆虫对控制输入的个体差异性,导致难以协调整个群体的运动

针对这些问题,新加坡南洋理工大学机械与航空航天工程学院的佐藤广隆 (Hirotaka Sato) 教授研究团队开发了一种先进的群体导航算法,可以防止半机械昆虫在穿越复杂地形时被困住据了解,佐藤教授早在2008年就首次展示了对单个机器人昆虫的控制。
2021年和2024年,佐藤教授与来自新加坡内政部科技局 (HTX) 和 Klass Engineering and Solutions 的合作伙伴展示了未来如何使用机器人昆虫进行搜索和救援行动

佐藤教授最新论文采用了领导者-追随者动态,其中一个半机械昆虫充当群体领导者,领导其他 19 个昆虫目前该论文已在《Nature Communications》发表论文共同通讯作者广岛大学的小仓正树教授和大阪大学若宫直树教授开发了群体控制算法和计算机程序,而南洋理工大学佐藤教授及其团队则准备了半机械昆虫群,在昆虫的电子背包上实现了该算法,并在新加坡进行了物理实验。
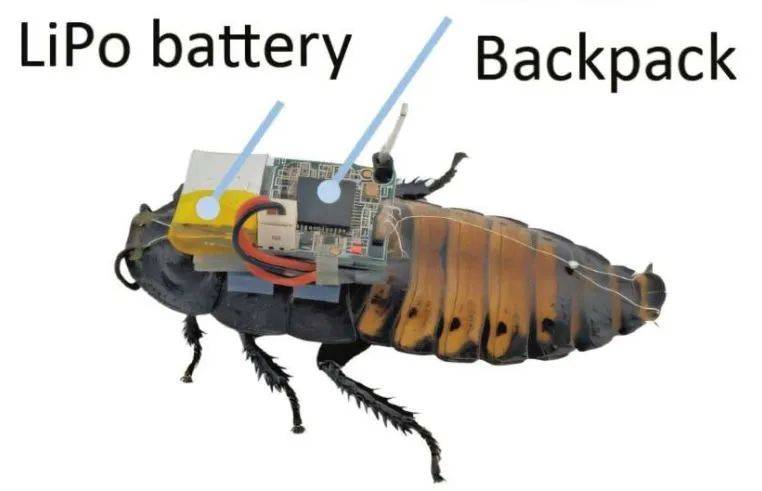
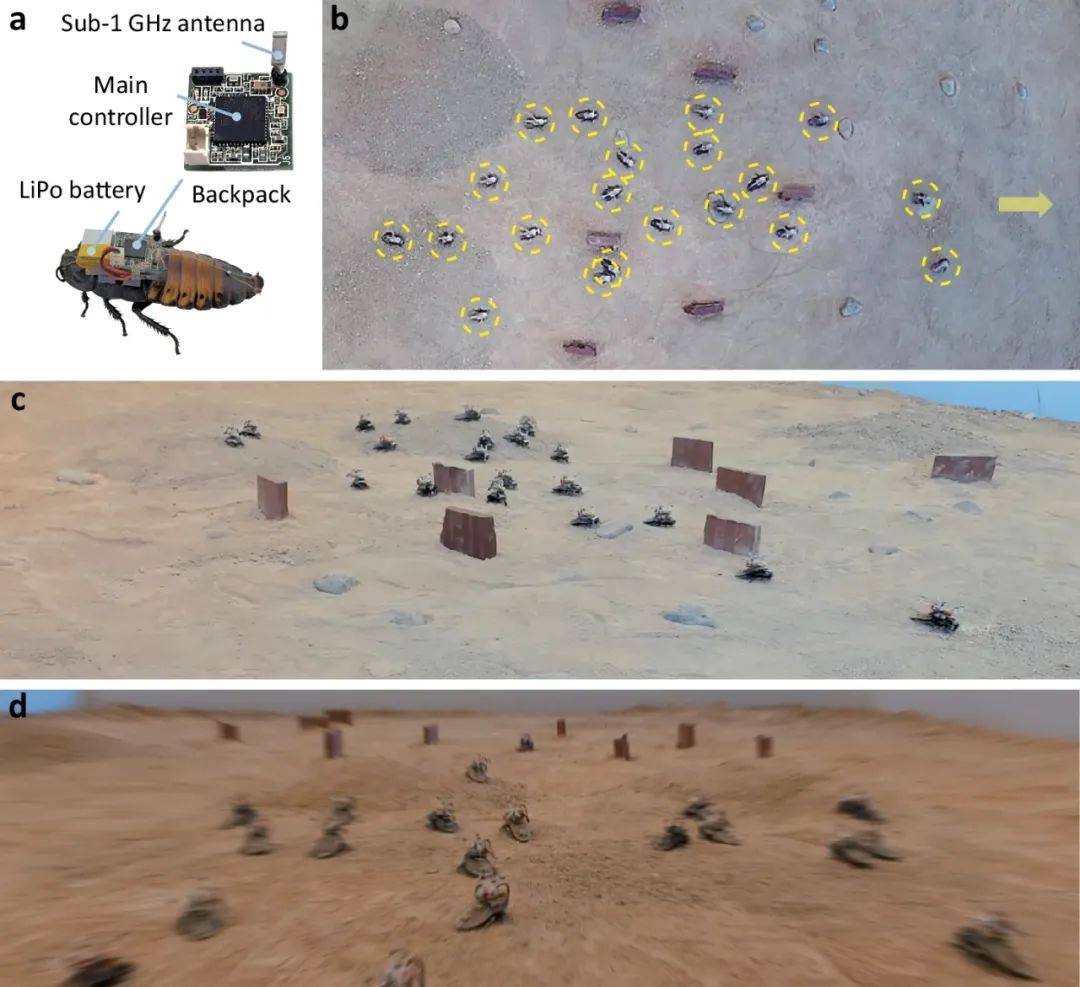
▍半机械昆虫群的工作原理解读在系统设计方面,研究团队使用的半机械昆虫系统由马达加斯加发声蟑螂(Gromphadorhina portentosa)和背包式电子控制器组成背包式电子控制器包含运动控制系统和无线通信模块,并由可充电的LiPo电池供电。
通过将电子控制器与活体昆虫结合,实现了对昆虫运动的可编程控制
群体系统由一个领导者和多个跟随者组成领导者被赋予目标位置的信息,而跟随者只能感知其邻居的相对位置所有个体都没有关于障碍物和地形的先验信息为了实现群体导航,本研究提出了一种基于游客跟随导游行为的控制算法控制算法由运动规划和轨迹跟踪两部分组成。
运动规划算法根据局部信息为每个个体提供下一时间步的期望位置,而轨迹跟踪算法则根据这些信息计算相应的刺激幅度和类型(左、右或加速),并将其应用于昆虫运动规划算法基于观察到的游客跟随导游的行为,提出了自由运动(FM)规则和向群移动(MTC)规则。
在自由运动规则下,跟随者在领导者可见或靠近群体时自由移动;否则,它们遵循向群移动规则,即向领导者或群体方向移动通过结合这两个规则,研究团队提出了基于旅游团体启发的(TGI)控制算法
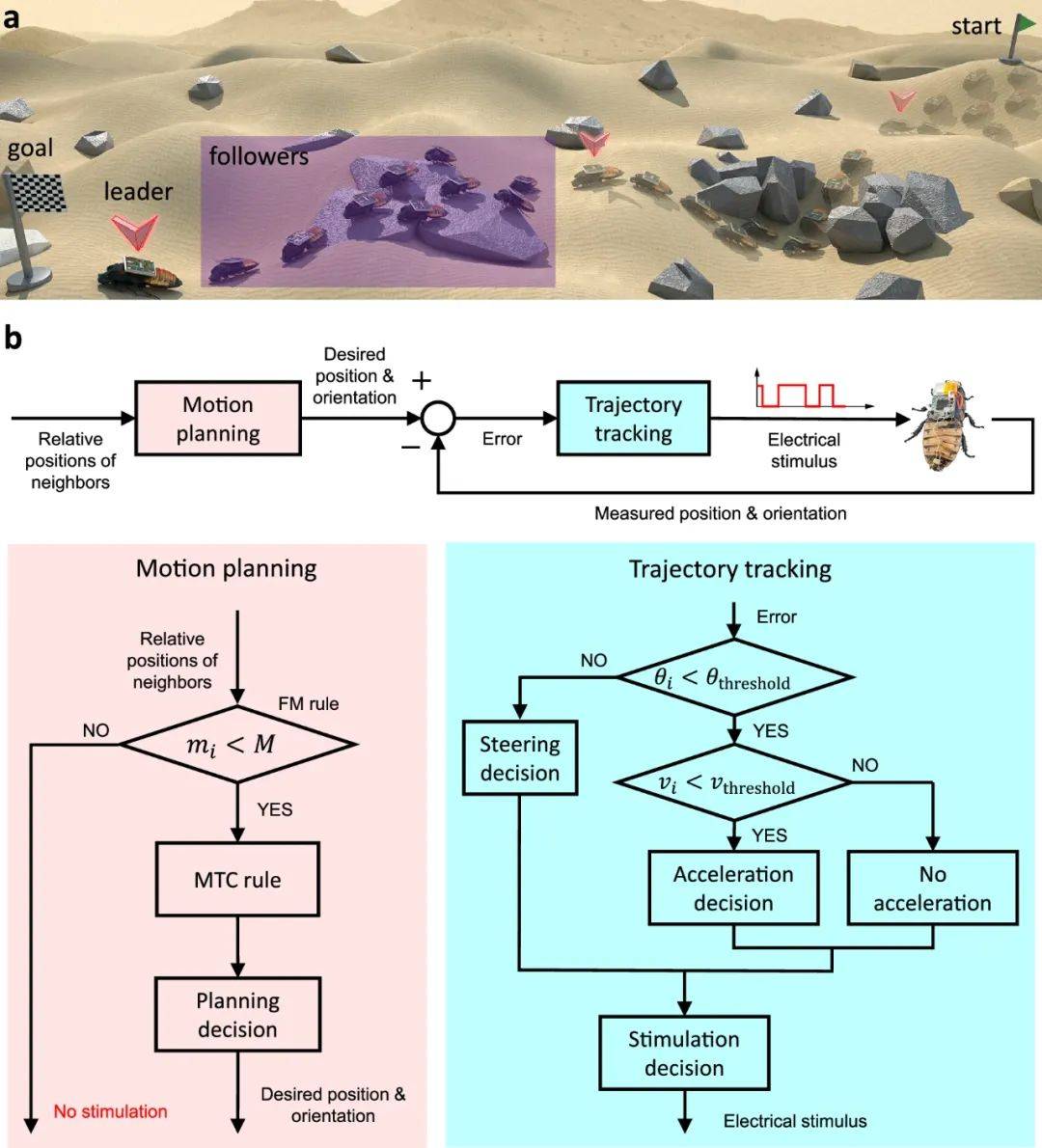
轨迹跟踪算法通过将跟随者的自由范围划分为多个扇区,并选择目标扇区中的任意个体作为目标个体,引导跟随者向目标个体移动如果跟随者当前移动方向与连接自身和目标个体的线之间的角度小于阈值,则不应用转向刺激,而是进行加速决策。
加速决策的规则是:如果跟随者的速度超过阈值,则不应用加速;否则,应用加速,其幅度与目标个体之间的距离成正比,但受最大电压限制▍实验结果与分析验证为了验证所提出算法的有效性,研究团队在真实世界中进行了实验。
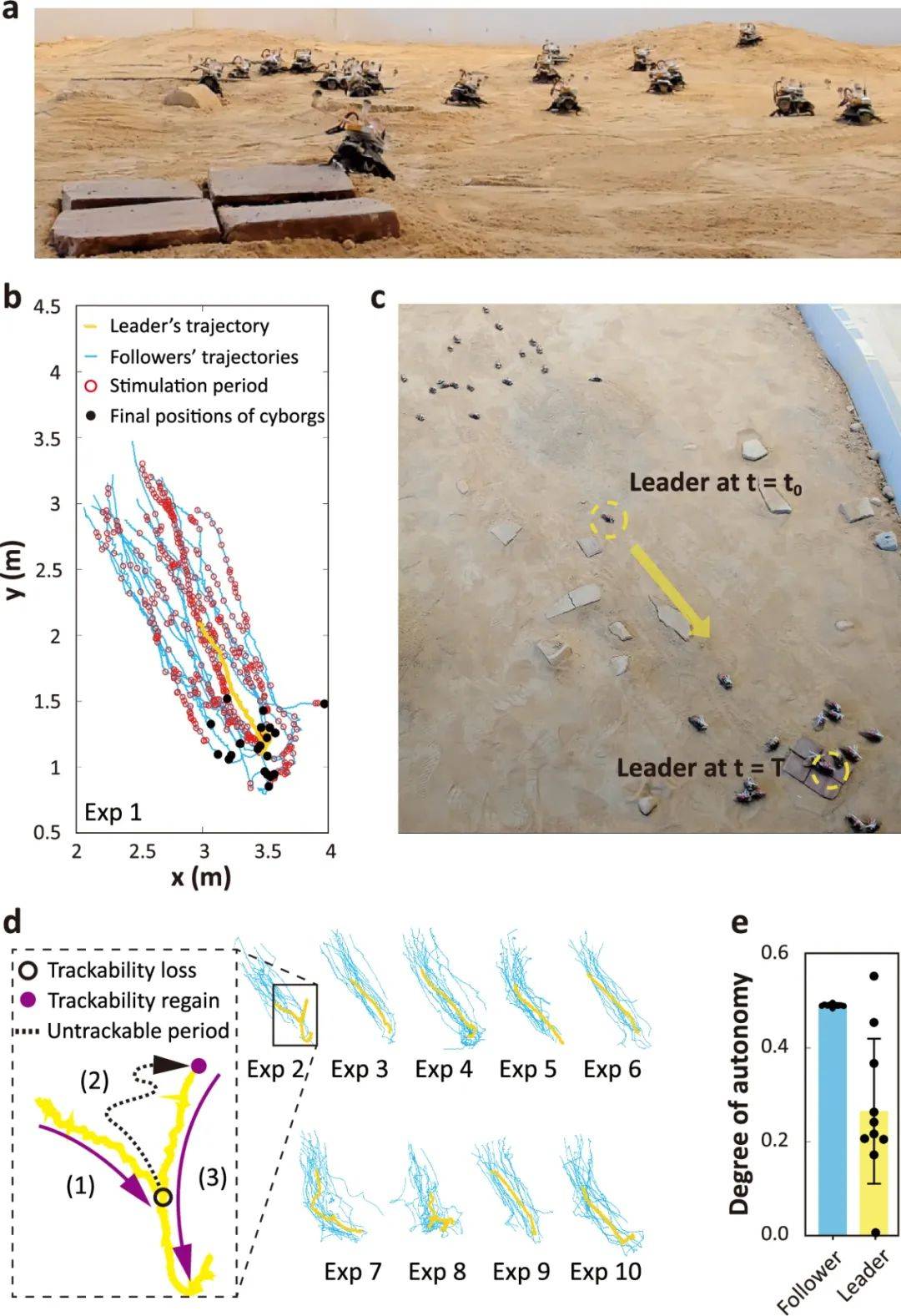
实验场景为一个3.5米×3.5米的沙地,其中包含岩石和山丘实验中使用了20个半机械昆虫,其中1个为领导者,其余19个为跟随者领导者被引导至目标位置,而跟随者则使用研究团队开发的TGI算法进行控制实验结果表明,所提出的控制算法能够成功引导群体到达指定目标区域。
通过十次重复实验,验证了实验的可重复性在群体自主性表现方面,基于团队开发的TGI控制算法,跟随者的自主性平均达到0.5,而在传统控制下领导者的自主性平均为0.26这表明所提出的算法能够显著延长昆虫的自由运动时间,从而有效减轻昆虫对刺激的适应性,节省背包电池电量,并延长群体的使用寿命。
与基于BOIDS算法的传统控制相比,所提出的TGI算法能够显著减少纠缠现象的发生。通过利用昆虫的自然行为来避免纠缠,TGI算法提高了群体的安全性。
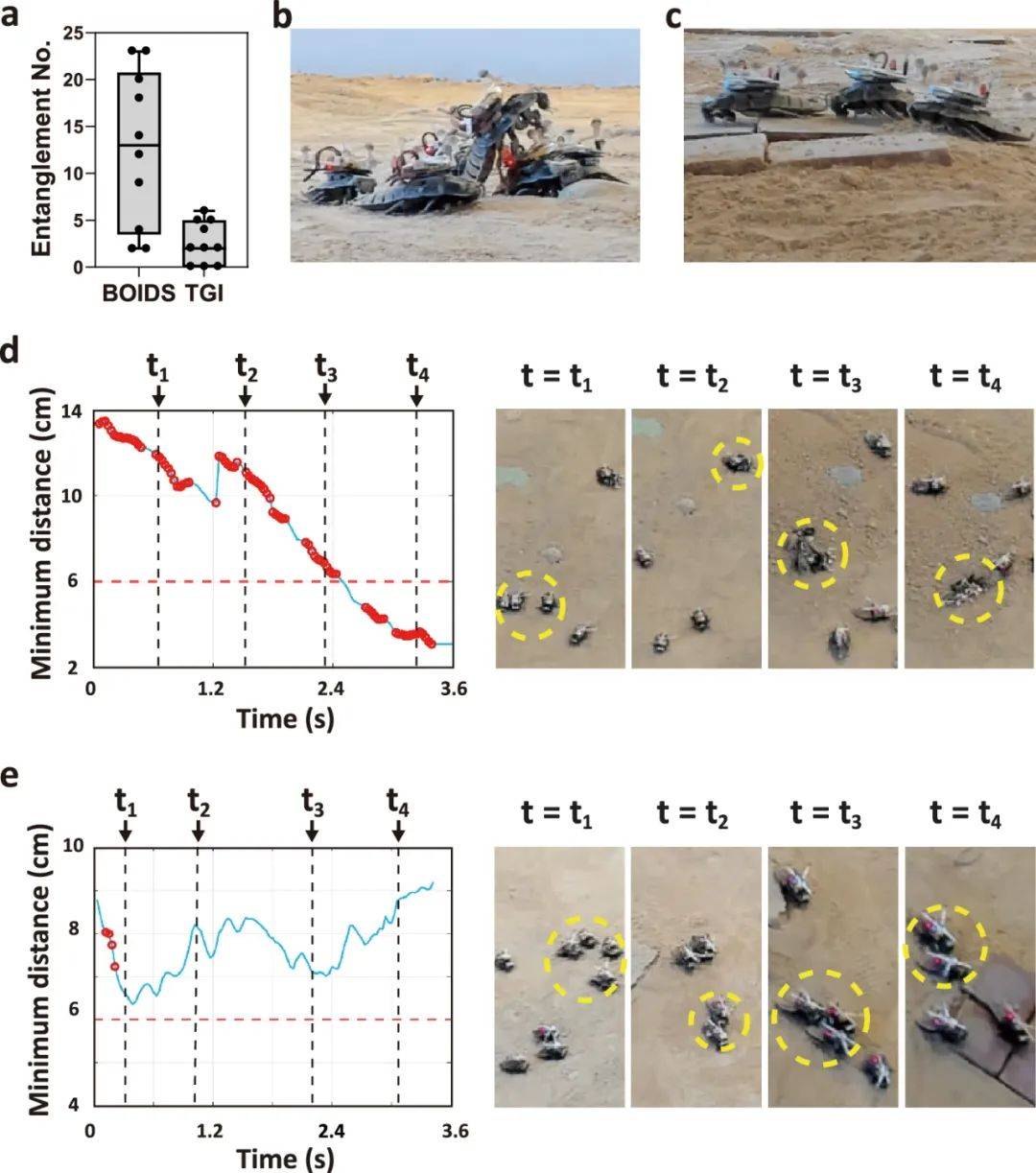
此外,TGI算法还能实现伙伴之间的脱困行为,当一个昆虫被障碍物卡住时,其他昆虫通过绕过它并间接引导它逃离障碍物,从而帮助整个群体通过障碍区域。
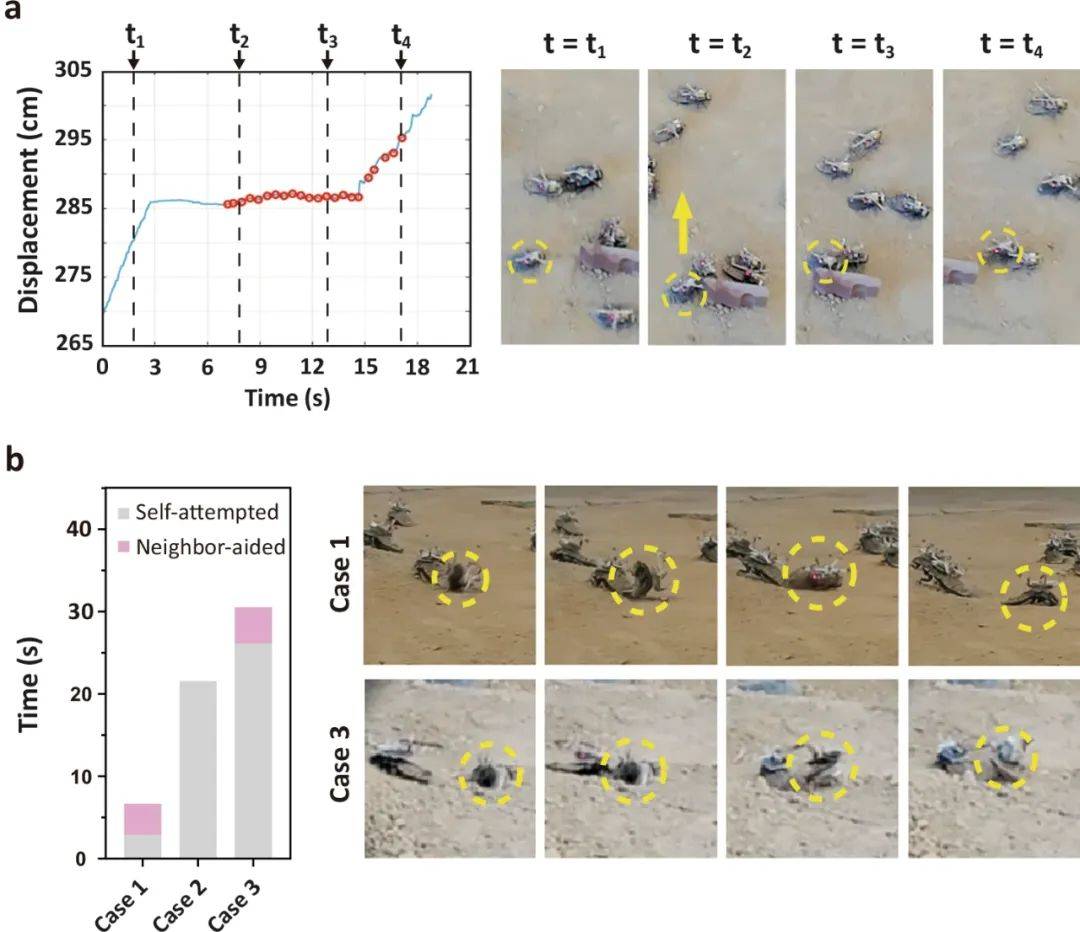
同时,研究人员还发现,半机械昆虫翻倒时,它附近的队友会帮忙它们会通过物理接触或者像抓握这样的动作,帮助翻倒的昆虫重新站起来这种合作互动增强了群体的整体韧性,而无需直接的算法干预▍结语与未来:与传统控制方法相比,南洋理工大学佐藤教授提出的TGI控制算法在安全性、续航能力和适应性方面表现出非常明显的优势。
通过利用昆虫的自然行为,TGI算法能够在不依赖精确运动控制的情况下实现紧凑的群体,并高效地在复杂地形中导航此外,通过减少控制输入的需要,TGI算法减轻了昆虫对刺激的适应性,并延长了群体的使用寿命不过佐藤教授也指出,尽管TGI控制算法在实验室环境中取得了令人兴奋的成绩,但将所提出的控制算法应用于更广泛的实际场景仍需要更加谨慎的验证。
未来团队会开发更加分散化的感知系统,使昆虫能够直接测量彼此之间的距离论文地址:https://www.nature.com/articles/s41467-024-55197-8返回搜狐,查看更多责任编辑: